Driverless Vehicles – What Makes You Think They are Safe?17 Nov
SBIR CONSULTANT BULLETIN – See National Science Foundation SBIR Proposal Topic, WT2, Wireless Devices and Components for Potential Bidding Opportunities
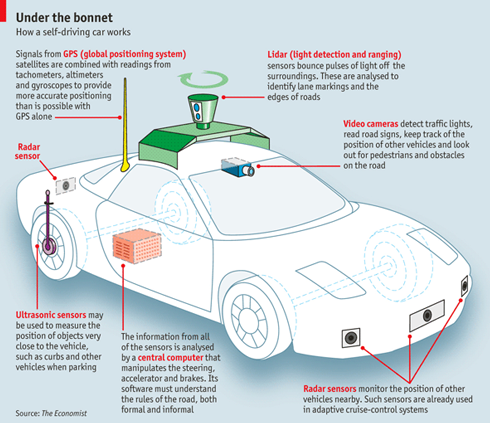
Driverless vehicles are equipped with several sensors to monitor the roadway and surrounding environment. These sensors include radar on the front end, a forward-looking video camera, a roof mounted LiDAR sensor, rear-mounted ultrasonic sensors, also another radar sensor affixed to the rear of the vehicle and GPS for vehicle location data. An onboard computer processes these sensor data to provide navigational/control signals for vehicle guidance. This sensor configuration is illustrated in the following link.
{kind=link}
Rather than relying on an extensive set of if-then rules applied to these sensor data, the onboard algorithm is trained on a vast set of traffic situations. This procedure is explained as follows. “… the programmers feed the software with many traffic situations and specify the correct action for each situation. The program then searches by itself for the best configuration of internal parameters and internal decision logic, which allow it to act correctly in all of these situations. Like with us humans, it then becomes difficult to answer the question why the car exhibits a specific behavior in a new situation: no “explicit rules” have been specified; the decision results from the many traffic situations to which the algorithm had been exposed beforehand.”
Before my family or I use a driverless vehicle, I would appreciate convincing answers to the following questions:
- How many sensors adequately characterize the vehicle trajectory and its highway environment? What does adequate mean? How can one answer this question?
- How many highway traffic scenarios should be presented to this driverless vehicle-learning algorithm? 1000? 10,000? How does one know?
- How well should this algorithm learn? Provide correct vehicle control signals 95 percent of the time? 99 percent? What is the test for judging learning performance?
- Google is gathering vast amounts of highway data in support of Question #2. Although Google is an impressive organization, who evaluates their learning algorithm performance?
- What does the National Highway Traffic Safety Administration(NHTSA) have to say on this matter?
- What about insurance companies and lawyers? What are their positions on driverless vehicle safety performance?