Autonomous Vehicles: Technology, Safety, Policy, and Market Motivation20 Feb
Dr. Jeffrey H. Everson*
Reading, MA 01867
According to a presentation (December 15, 2016) by the Automated Vehicles Working Group (AVWG) of the Massachusetts Department of Transportation (MASS DOT), there is a requirement for technical experts to support this group:
- Provide input guidance to MASSDOT for safe testing of AV technologies
- Ensure that AVs, which have completed testing, can be operated safely to advance the welfare of Massachusetts residents
- Follow developments in AV technology, Federal policy and laws/policies in other states
- Facilitate the widespread deployment of Automated Vehicles (AV) in Massachusetts.
Several other states have similar interests in Autonomous Vehicles.
I can support these requirements based on my technical background and program management experience. The latter stems from programs awarded to me by the US Department of Transportation (US DOT).
Crash Warning Systems: I have extensive contractual experience as Principal Investigator (PI) with vehicle crash warning systems for Run-Off-Road (ROR),and Intersection collisions for automobiles, as well as crash warning systems for inner city transit buses. This work was a precursor development leading to driverless vehicles. Contracts for these programs were awarded by the National Highway Traffic Safety Administration (NHTSA) and the Federal Transit Administration (FTA). The first two programs were performed at Battelle Memorial Institute as a subcontractor to Carnegie Mellon University, while the third was undertaken at Foster-Miller, Inc. as a subcontractor to Calspan.
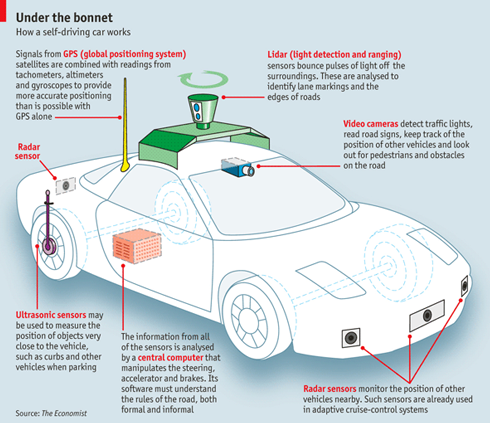
On Board Vehicle Sensors: Sensors for these vehicles were selected from visual/infrared, acoustic, radar, and Light Detection and Ranging (LIDAR) technologies. Data from these sensors served as input to onboard computers equipped with algorithms designed to issue warnings for crash avoidance. Warning modalities included visual, audio and haptic (i.e., vibrating driver seat or steering wheel).
Computer Simulations: The ROR project involved a computer simulation to test various driver warning algorithms. The simulation included human factor inputs for driver steering, throttling and braking. The simulated automobile was a Ford Taurus that was operated on a roadway designed with various curves and straight segments.
Test Vehicle Design: During the ROR program, I was involved with the design of a test vehicle. This included:
- Review state-of-the-art sensing, processing and driver interface technologies for their applicability to Run-Off-Road collision prevention
- Design an advanced test bed vehicle for evaluating alternative countermeasures
Driver Training Simulator for Warning Algorithm Evaluation: My work on inner city transit buses involved a test of various warning algorithms integrated within a driver training simulator utilized by the New York City Transit Authority. Transit operators were recruited as study participants. My work also included a statistical analysis of transit operator responses to alerts as a function of warning modality and timing with transit operator experience, age and gender as control parameters.
Sensor Performance During Inclement Weather: A serious issue for driverless vehicles is operation during inclement weather. I worked on this problem in relation to sensor performance and weather effects modeling.
My Experience with Autonomous Vehicles: According to the Society of Automotive Engineers (SAE), there are 6 levels of vehicle automation, starting with 0 (i.e., no automation) and ending with 5 (i.e., complete system level automation with no driver involvement).** My work described above spans levels 0-2, and overlaps levels 3-5.
My Future Work: I continue to follow driverless vehicle developments regarding Testing, Technology, Machine Learning, Policy, Weather and Cyber Security.
*PhD, Physics, Boston College
** www.massdot.gov, op. cit. p 15.
{kind=link}